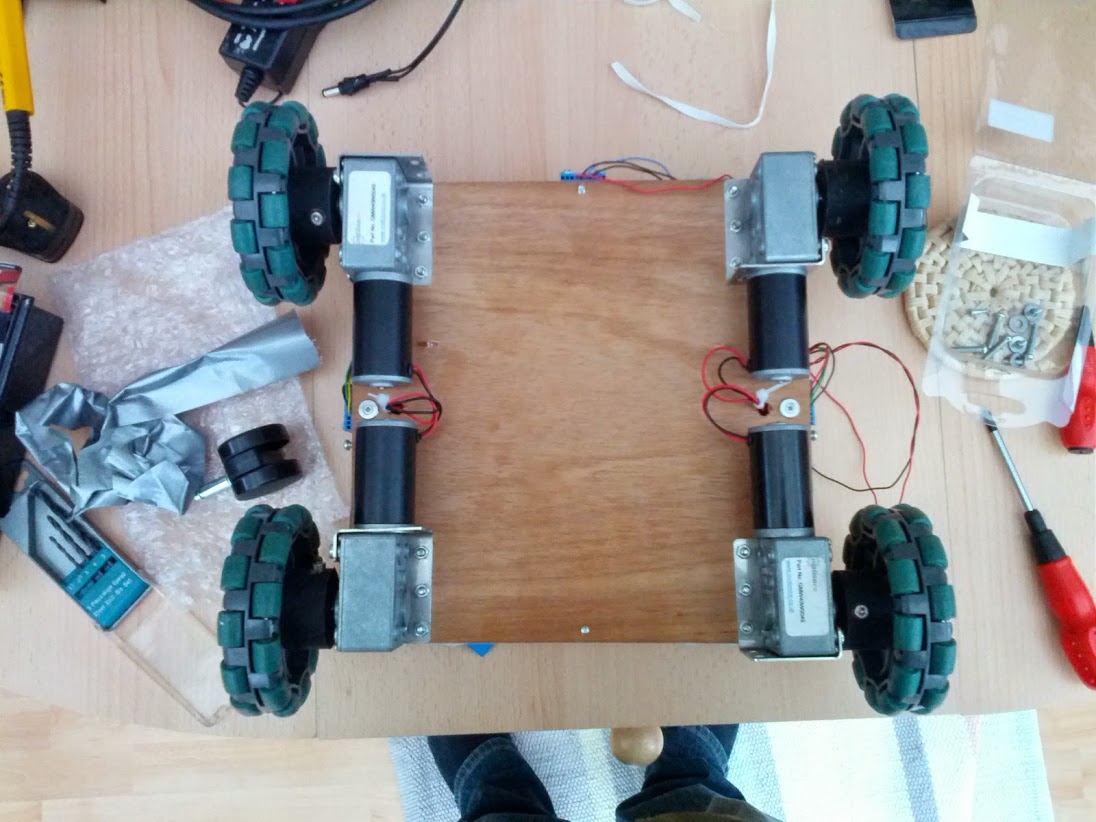
I’m building a robot which will have sonar and IR ranging units for navigation and 2 cameras on-board allowing for stereoscopic vision. Here is my first go at putting together a prototype wheeled robot chassis.
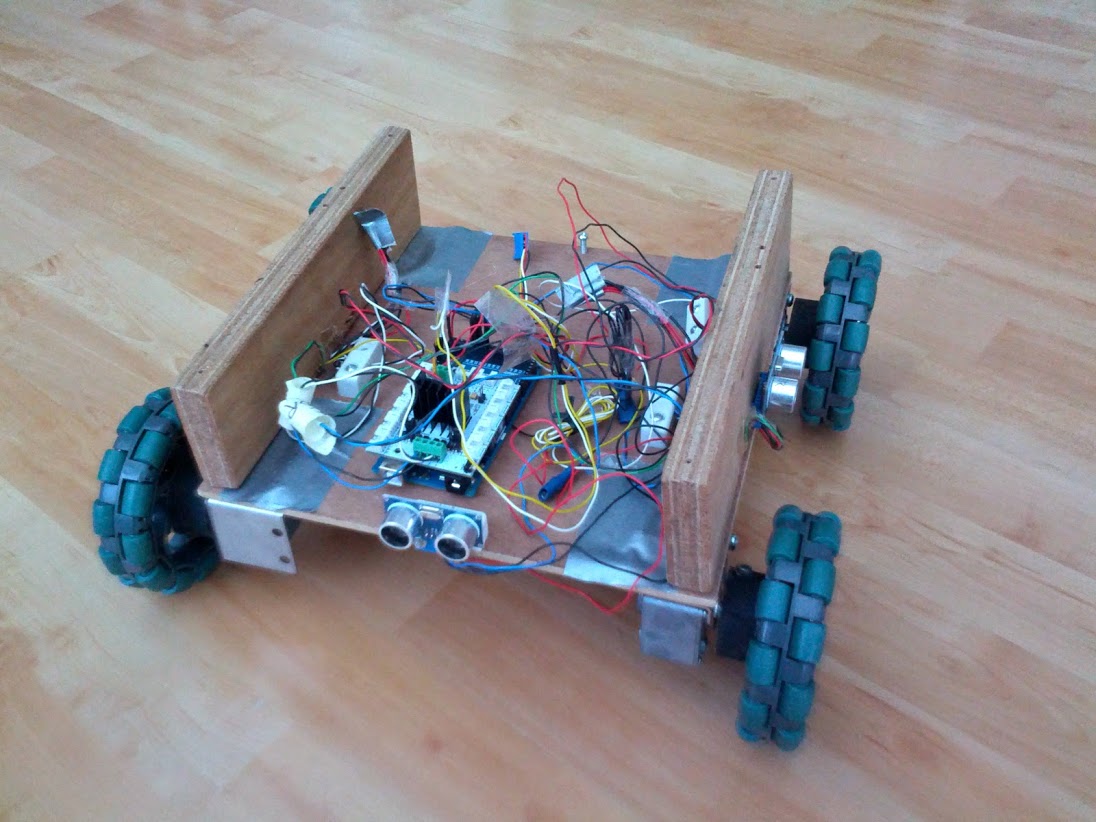
As you can probably see here it will be controlled by an Arduiono at the very lowest level. Controlling the Arduino will be an embedded Linux system, e.g. a raspberry pi or banana pi, having a radio / wirless link for accessing the Linux system.
I’ll post the results of how it drove on various surfaces.

Here’s one with the cameras on-board and the old wheels which i replaced with the above omni-wheels.

Edit: The robot is having difficulty turning on very thick fluffy carpet. It looks like more power is required. I am currently working on a prototype 2 chassis that I will post here.