The previous robot prototype chassis did not work very well on high friction surfaces (carpets, grass etc.). Thus prototype 2 was born.
The problems were caused by 2 things as far as I can tell, trying to skid all 4 wheels and also having 4 motors that did not have enough torque. This lead to Prototype 1 stalling frequently when rotating.
Prototype 2 (P2) uses only 2 motors but they have much more torque. The other main change was to have most of the weight over the 2 driven wheels, causing the entire robot to pivot around the centre of that axle.
Here are the two chassis designs, P1 wasn’t a success due to underpowered motors and skidding all 4 wheels:
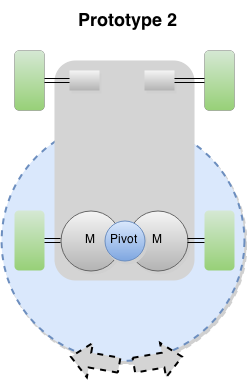
P2 worked well, mainly due to the increased torque.
Here are a few pictures of P2 (please forgive the tape, this was its first ever test, everything will be mounted nicely soon!):
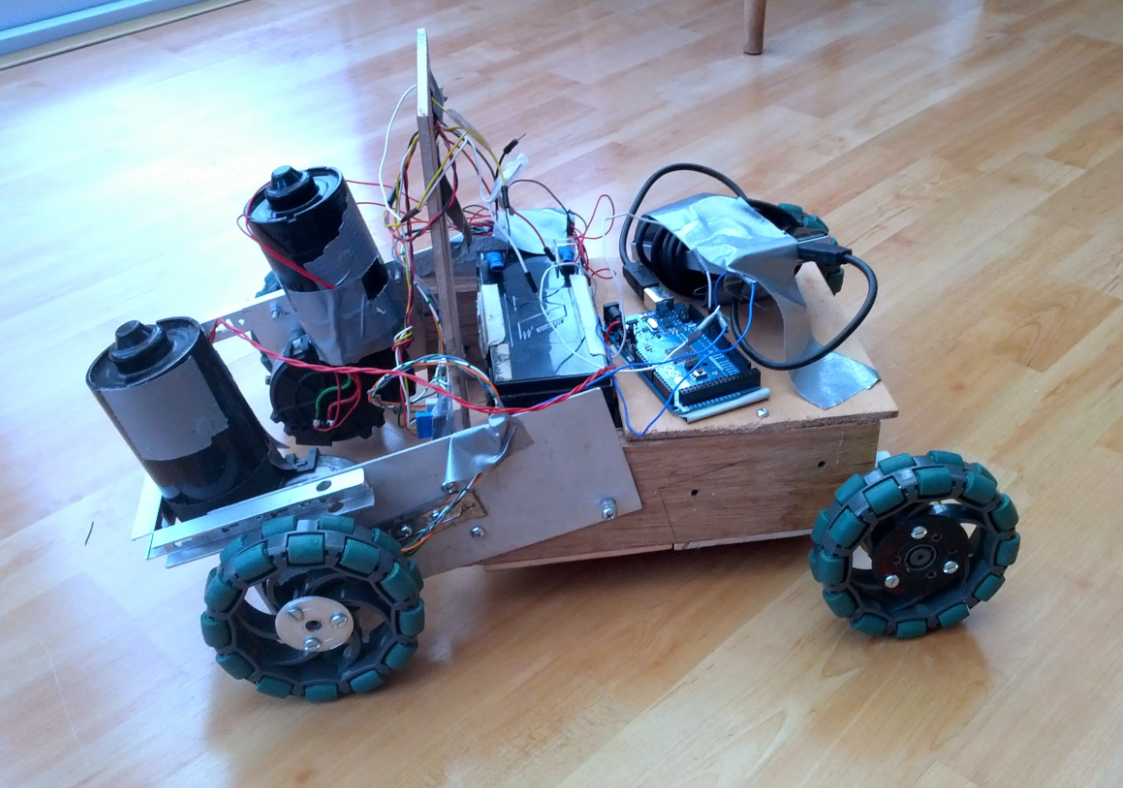
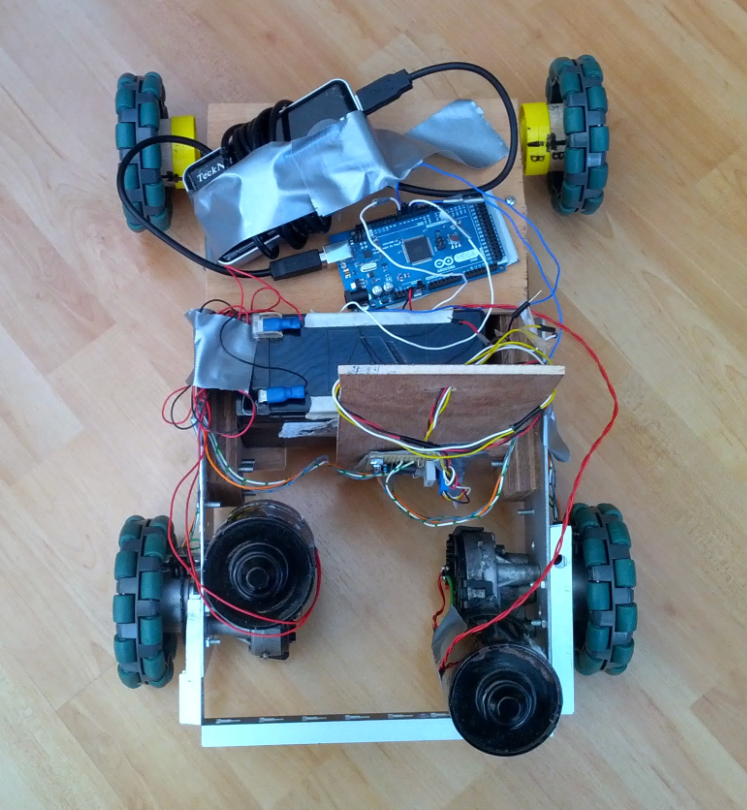
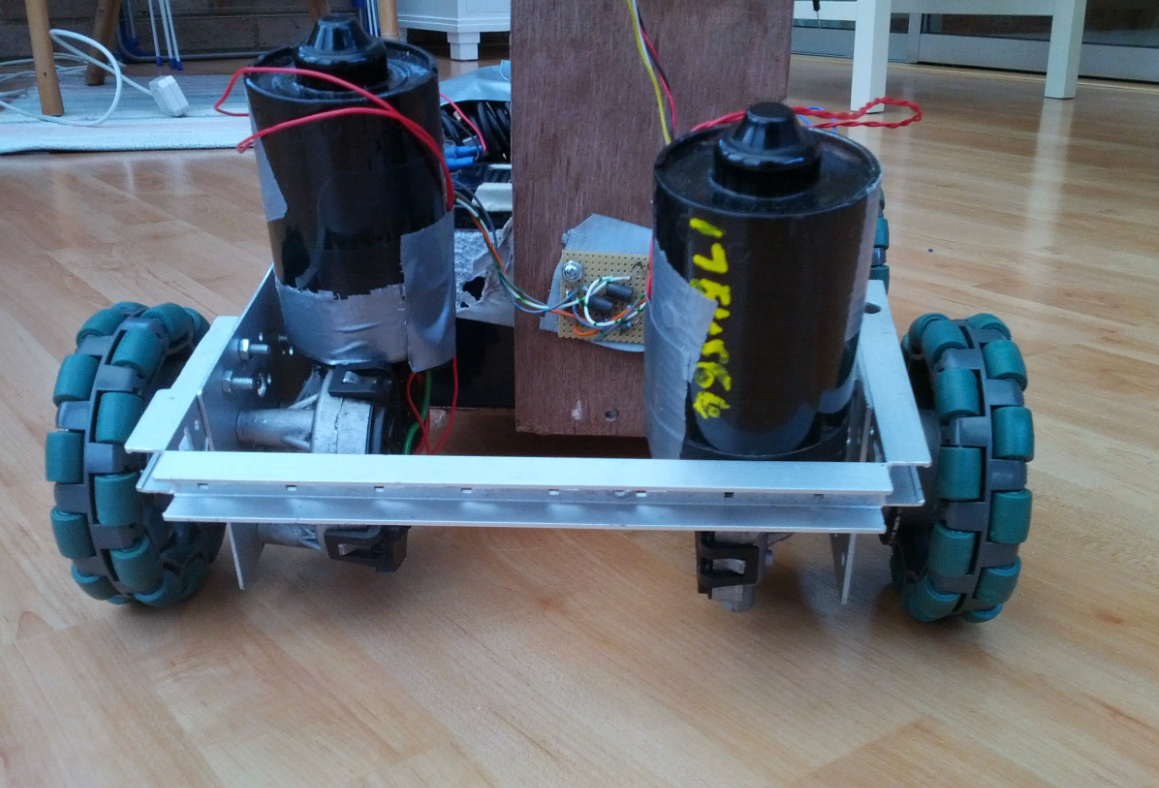
The motors are windscreen wiper motors from a small car. The motors are running off of a 12v lead acid battery. If you use windscreen wiper motors please read this post carefully as they’re not just a simple motor with +ve and -ve!
Keep it up dude, liking the progression!
Cheers buddy!